T300 robot 3.0 at AISVN



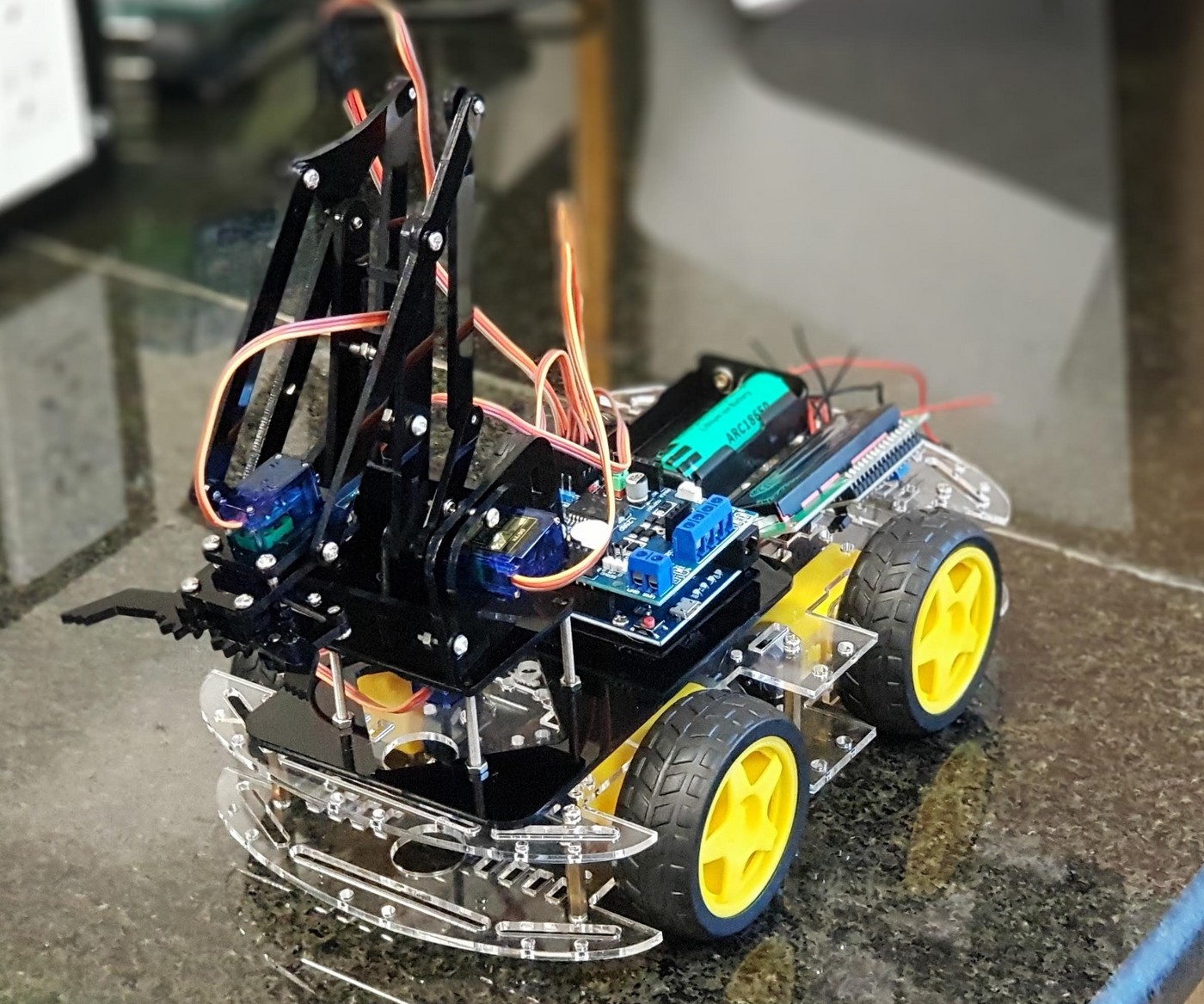
This is the third iteration of our robots at AISVN as described in the history further down. It used the Arduino Leonardo and incorporates:

This is our third iteration of student created robots. It includes:
- Motorshield L298 with buzzer on pin4
- 4 DoF robot arm with 4 servos on pin A0 to A3
- Bluetooth Low Energy connection with pin 0 and 1 (Serial1)
- PWM motor control on pin 10 to 13
- 1602 LCD display over I2C on pin 2 and 3 SDA SCL
- MPU6050 gyroscope for location control on I2C
- Ultrasonic distance with pin 7 (trigger) and pin 8 (echo/response)
- PS2X controller at pin 5 SC, 6 CLK, A4 DAT and A5 CMD
Materials
We ordered the following materials for all students among others at CỬA HÀNG IC ĐÂY RỒI. This gives a common ground for further experiments both in software and hardware:
| nr | name | amount | unit price | price | link |
|---|---|---|---|---|---|
| 1 | Arduino Leonardo | 1 | 125.000 VND | 125.000 VND | link icdayroi.com |
| 2 | Robot base 4 wheels | 1 | 140.000 VND | 140.000 VND | link icdayroi.com |
| 3 | Motor Shield L298 | 1 | 120.000 VND | 120.000 VND | link icdayroi.com |
| 4 | Bluetooth AT-09 | 1 | 75.000 VND | 75.000 VND | link icdayroi.com |
| 5 | Battery 18650 3.7V | 2 | 35.000 VND | 70.000 VND | link icdayroi.com |
| 6 | Battery holder 2C 18650 | 1 | 7.000 VND | 7.000 VND | link icdayroi.com |
| 7 | Power switch MTS 102 | 1 | 4.000 VND | 4.000 VND | link icdayroi.com |
| 8 | Battery voltage display | 1 | 22.000 VND | 22.000 VND | link icdayroi.com |
| 9 | Servo SG90 | 5 | 29.000 VND | 145.000 VND | link icdayroi.com |
| 10 | Ultrasonic module HC-SR04 | 1 | 20.000 VND | 20.000 VND | link icdayroi.com |
| 11 | Robot 4DOF kit | 1 | 246.000 VND | 246.000 VND | link lazada.vn |
| 12 | Wires DuPont MF and FF | 20 | 300 VND | 6.000 VND | link thegioiic.com |
| 13 | Voltmeter for Battery | 1 | 21.000 VND | 21.000 VND | link thegioiic.com |
| 14 | Display 1602 3.3V white on blue | 1 | 32.000 VND | 32.000 VND | link thegioiic.com |
| 15 | I2C serial to parallel adapter | 1 | 13.500 VND | 13.500 VND | link thegioiic.com |
| 1.046.500 VND |
Apart from these materials for 1.046.500 VND or 45 USD we need some time to assemble all parts - and then to program the robot car! Over the months of development several changes and standardizations took place. We ended up with a standard as platform at AISVN, to be found in the respective github project.
Building steps
- Assemble the robot
- Connect the motors to M1 and M4 on the L293D shield
- Connect the bluetooth module pin TXD to pin 8 of the motorshield
Remote
how to control with 10 keys
| Key | Character | Mode 1 | Mode 2 | Mode 3 | Mode 4 |
|---|---|---|---|---|---|
| ↑ | F | forward | forward | ||
| ↓ | B | backward | backward | ||
| ← | L | left | left | left | |
| → | R | right | right | right | |
| Select | M | Menu+ | Menu+ | Menu+ | Menu+ |
| Start | S | Start | Return | toggle sound | start autonomous |
| △ | T | turbo | up | ||
| ○ | C | faster | open | ||
| X | X | Stop | down | Stop | |
| ☐ | Q | slower | close |

- ‘F’ forward
- ‘B’ backward
- ‘L’ turn left
- ‘R’ turn right
- ‘M’ select (menu)
- ‘S’ start
- ‘T’ triangle
- ‘C’ circle
- ‘X’ button X
- ‘Q’ sQuare
Pin assignment
| pin | general | used for | note |
|---|---|---|---|
| 0 | RX | Bluetooth RX | |
| 1 | TX | Bluetooth TX | has voltage divider 1kΩ/2kΩ for 3.3V |
| 2 | SDA | I2C | Display 1602 and |
| 3~ | SCL | I2C | MPU 6050 gyroscope |
| 4 | buzzer | acoustic feedback | |
| 5~ | PS2X CS | Chip Select (SPI SS) | |
| 6~ | PS2X CLK | Clock (SPI SCLK) | |
| 7 | Ultrasonic trigger | ||
| 8 | Ultrasonic echo | ||
| 9~ | Servo ultrasonic | ||
| 10~ | E1 | enable Moter 1 (PWM) | |
| 11~ | E2 | enable Motor 2 (PWM) | |
| 12 | M1 | forward/backward | |
| 13 | LED | M2 | forward/backward |
| A0 | Servo left-right | Robotarm 5-175 | |
| A1 | Servo up-down | Robotarm 45-120 | |
| A2 | Servo forward-back | Robotarm 65-140 | |
| A3 | Servo open-close | Robotarm 90-125 | |
| A4 | PS2X DAT | Data (SPI MISO) | |
| A5 | PS2X CMD | Command (SPI MOSI) |
Issues
After some time of use almost all of the boards no longer support PWM for pin 11 on the motor shield. Any value below 255 is interpreted as a low and the motor is shut off. Not very usefull for a motor project. Same is true for pin 1. Even though a voltage divider with 1kΩ/2kΩ is reducing the output voltage of the Arduino to 3.3 V several boards don’t submit any signal. The bluetooth module can therefore only receive information, but not send them back.
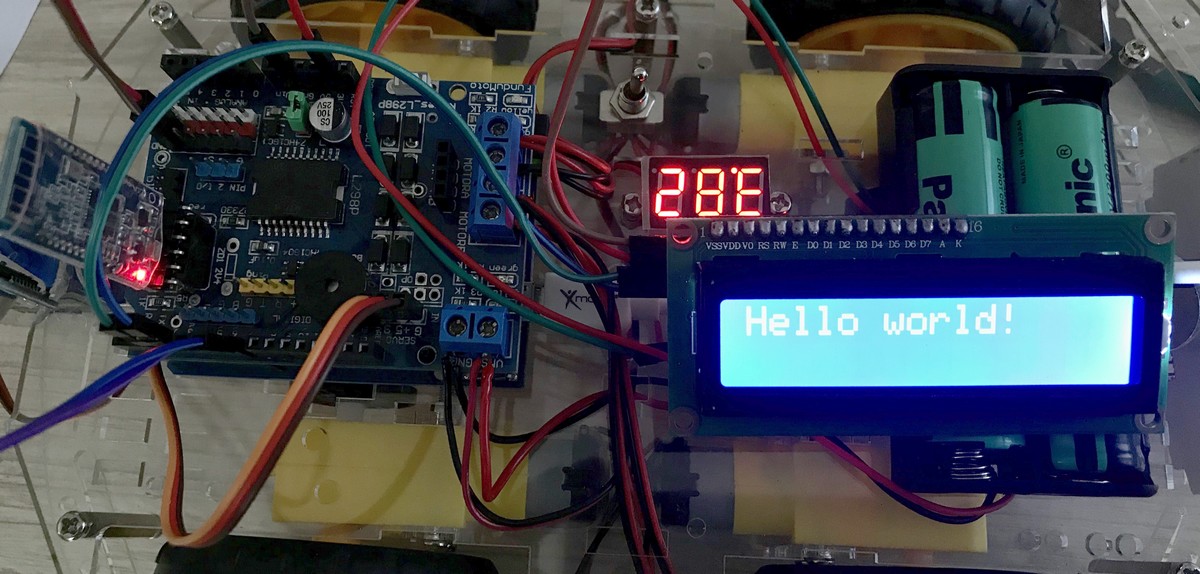
1602 display over I2C
For optic feedback on the selected mode and current status we added a display with 16 characters in 2 rows. Instead of using 8 digital lines from the Arduino we utilized the I2C bus and needed only 2 wires - and potential 225 further I2C devices to connect. On November 24th, 2019 we got the successful feedback:
History
- 2019-12-17 T300 this robot with 4 wheels, robot arm, ultrasonic distance sensor is the enhanced asa robot. Winner of the first AISVN robot competition ROBOT 2019.
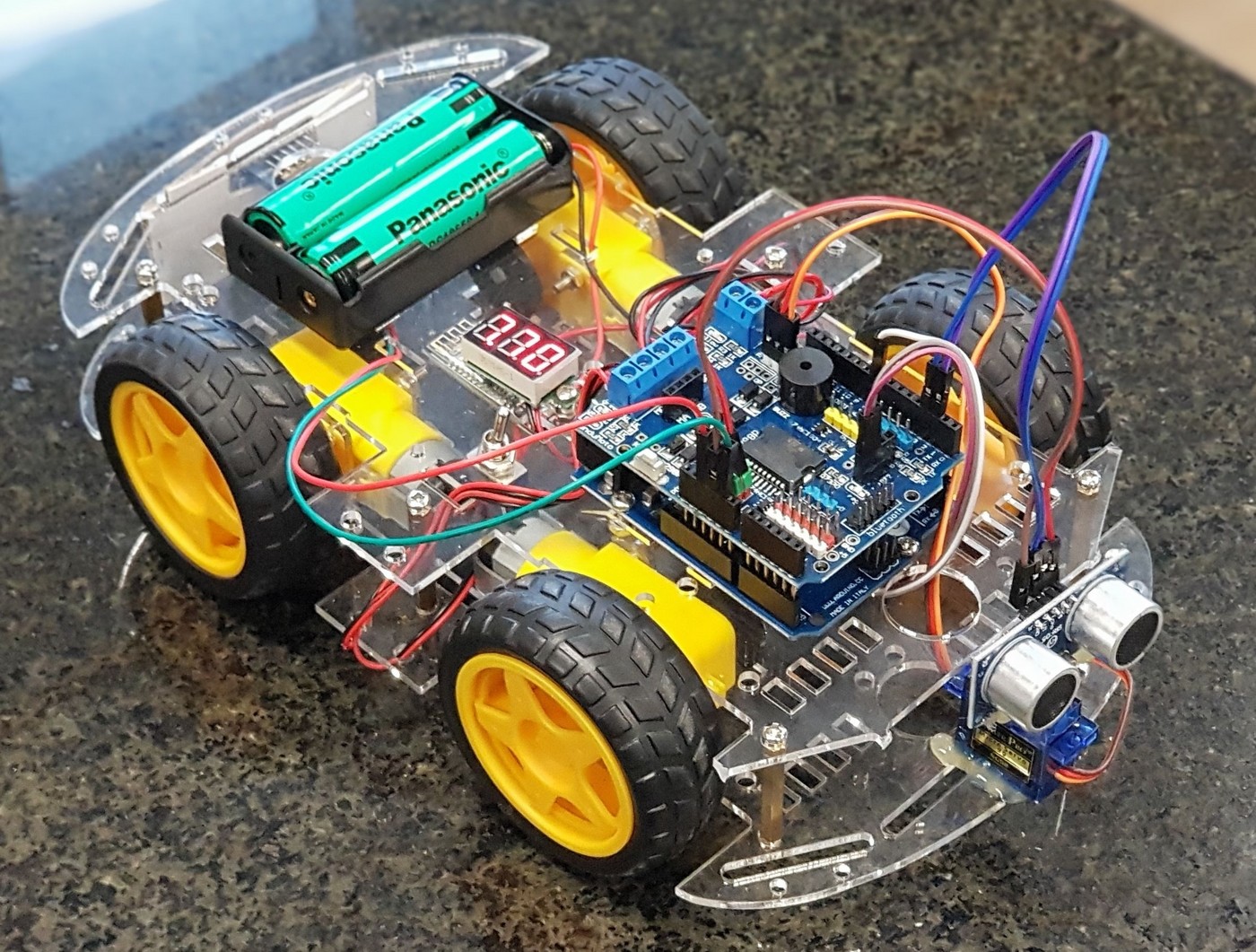
- 2019-11-04 asa robot from first ASA period 2019/2020, evolved to T300 in the second period. After 9 sessions 60% of the students successfully finished their remote controlled robot.
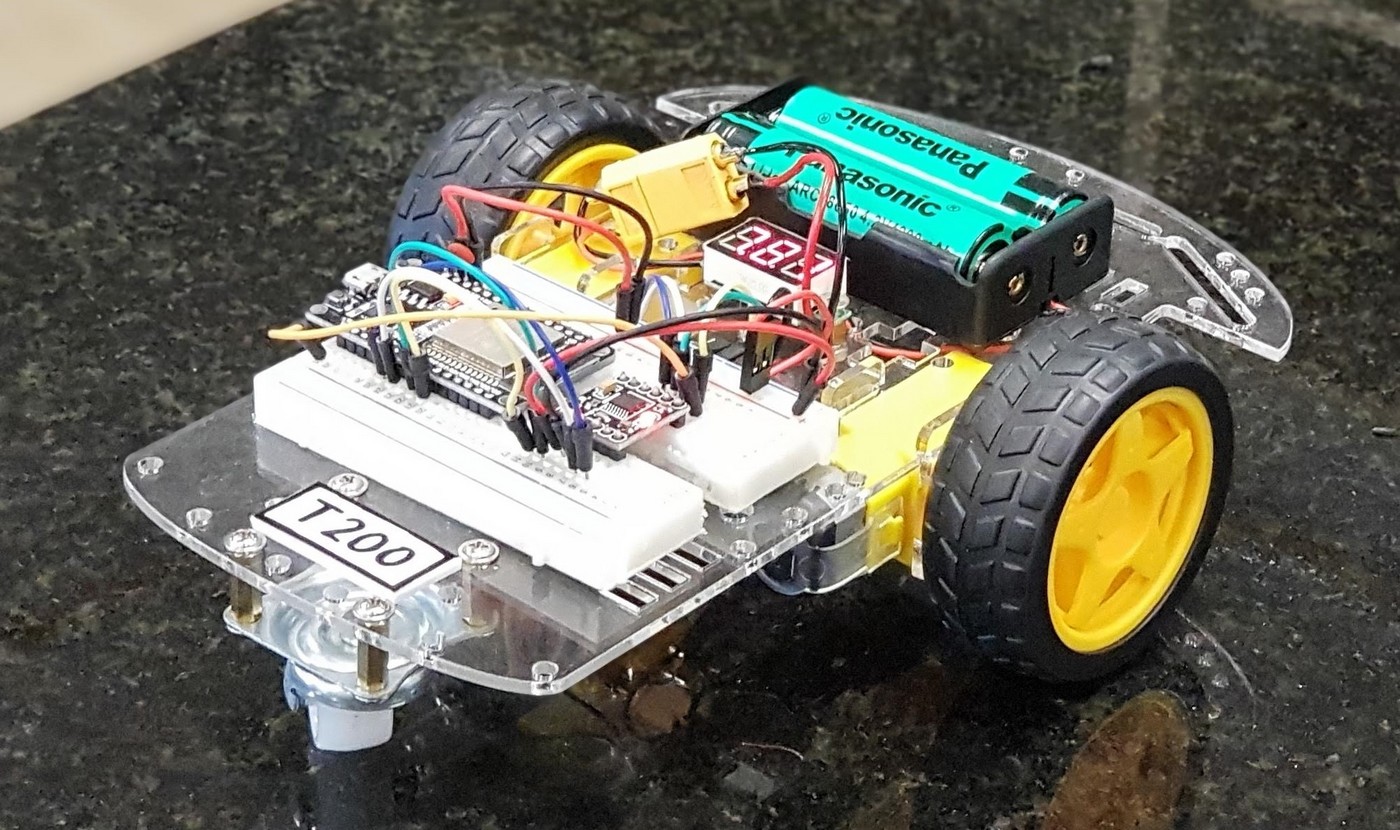
- 2019-04-08 T200 updated 2-wheel robot, controlled by an ESP32 over BLE and the software reverse engineered for our purpose.
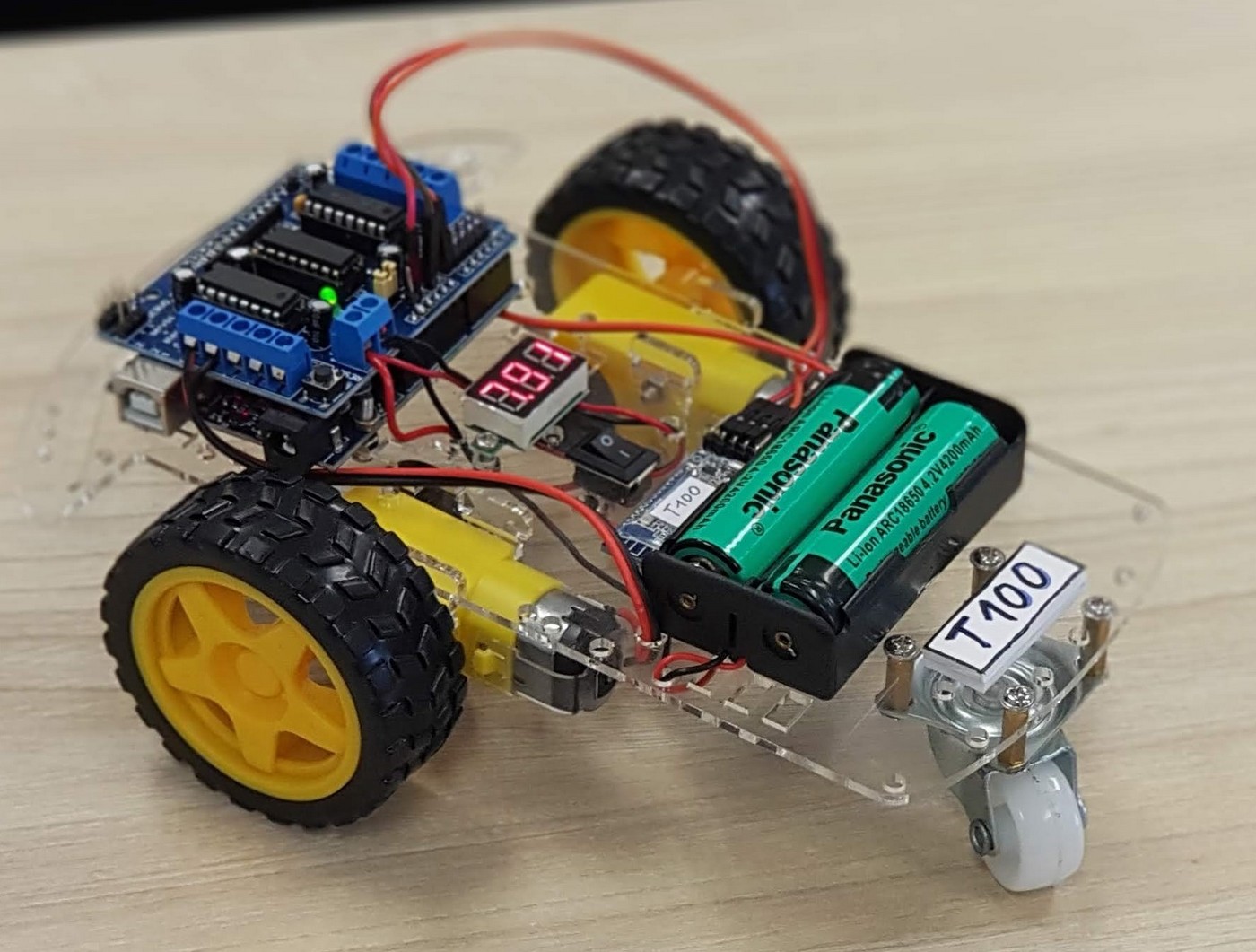
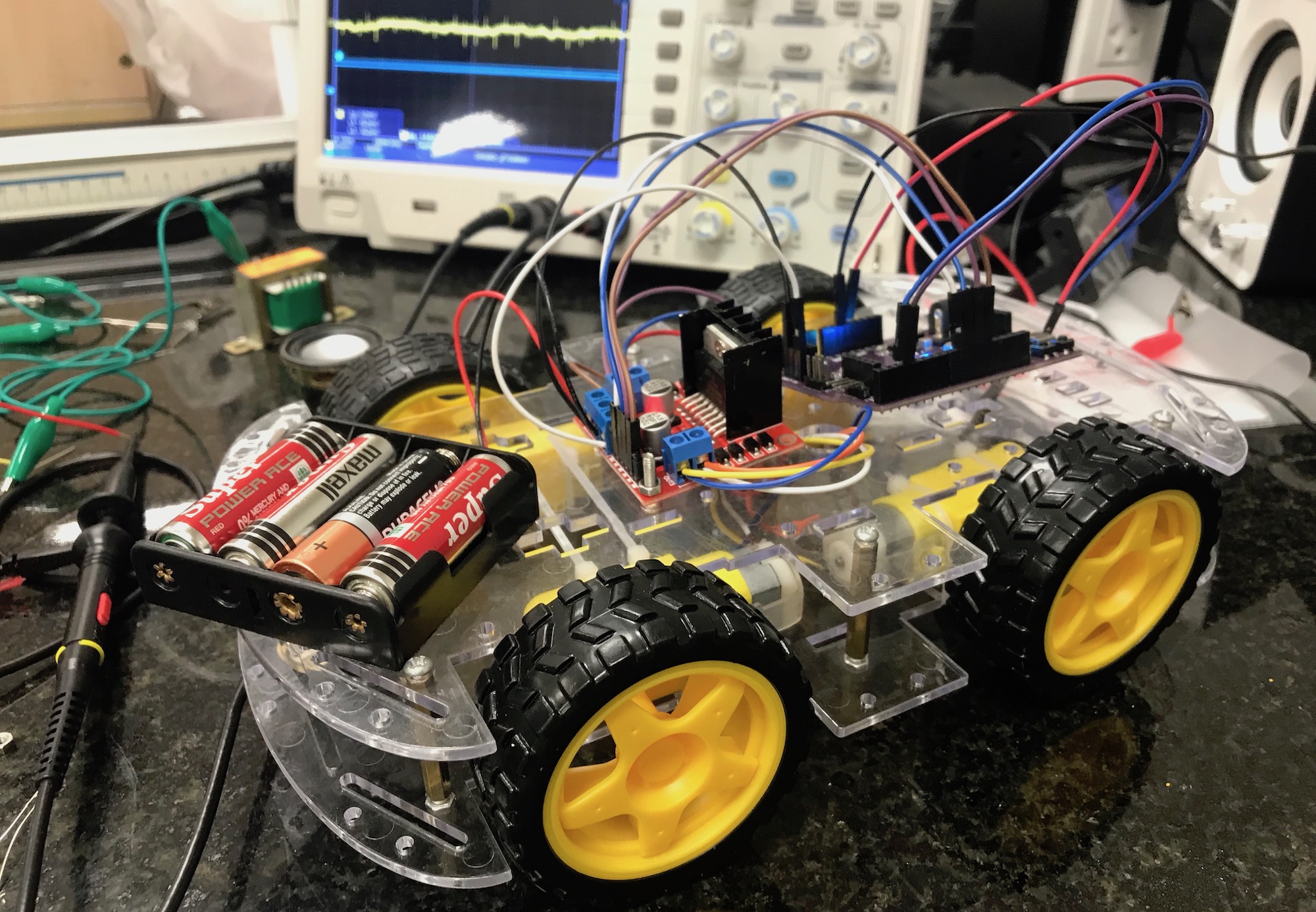
- 2019-03-26 T80 simplified version for Viet for the Sciencefair 2019 Design project. Has a L298N motor driver and HC-05 bluetooth module. Power supply was upgraded to LiIon because the 4 AA batteries provided not enough voltage for the bluetooth module once the motors where started.
- 2018-10-25 T110 updated robot with Bluetooth 4.0 remote to be used by iOS devices.
- 2018-10-09 T100 first robot with Bluetooth remote control, 2 wheels, L293D motorshield.
Gallery






Materials 2019 - has been updated
We ordered the following materials at CỬA HÀNG IC ĐÂY RỒI for all students to have a common ground for further experiments both in software and hardware:
- Arduino Leonardo (because of the Micro-USB interface) 125.000₫
- Khung xe robot 4 bánh (4 wheels - stable driving) 140.000₫
- Arduino Motor Shield L298 120.000₫
- Module thu phát bluetooth HC-05 80.000₫
- Pin Cell 18650 4200mAh 3.7V (4 AA batteries are not enough for motor and bluetooth, and not rechargable) 35.000₫
- Hộp đế pin 18650 loại 2 cell battery holder for two 18650 batteries 7.000₫
- Công tắc gạt MTS-103 3 trạng thái power switch for the robot 5.500₫
- Đồng hồ đo Vôn (Volt) 3.5-30V Voltage display to check the charge level of the battery 22.000₫
- Four 10 cm cable 0.25 mm² to connect the motors to the shield ₫
- Three female-male jumper wire to connect the bluetooth module to the Arduino (+3.3V, GND, RX)
- So in general: some jumper wires 19.000₫
- Maybe a breadboard to connect 5.000₫
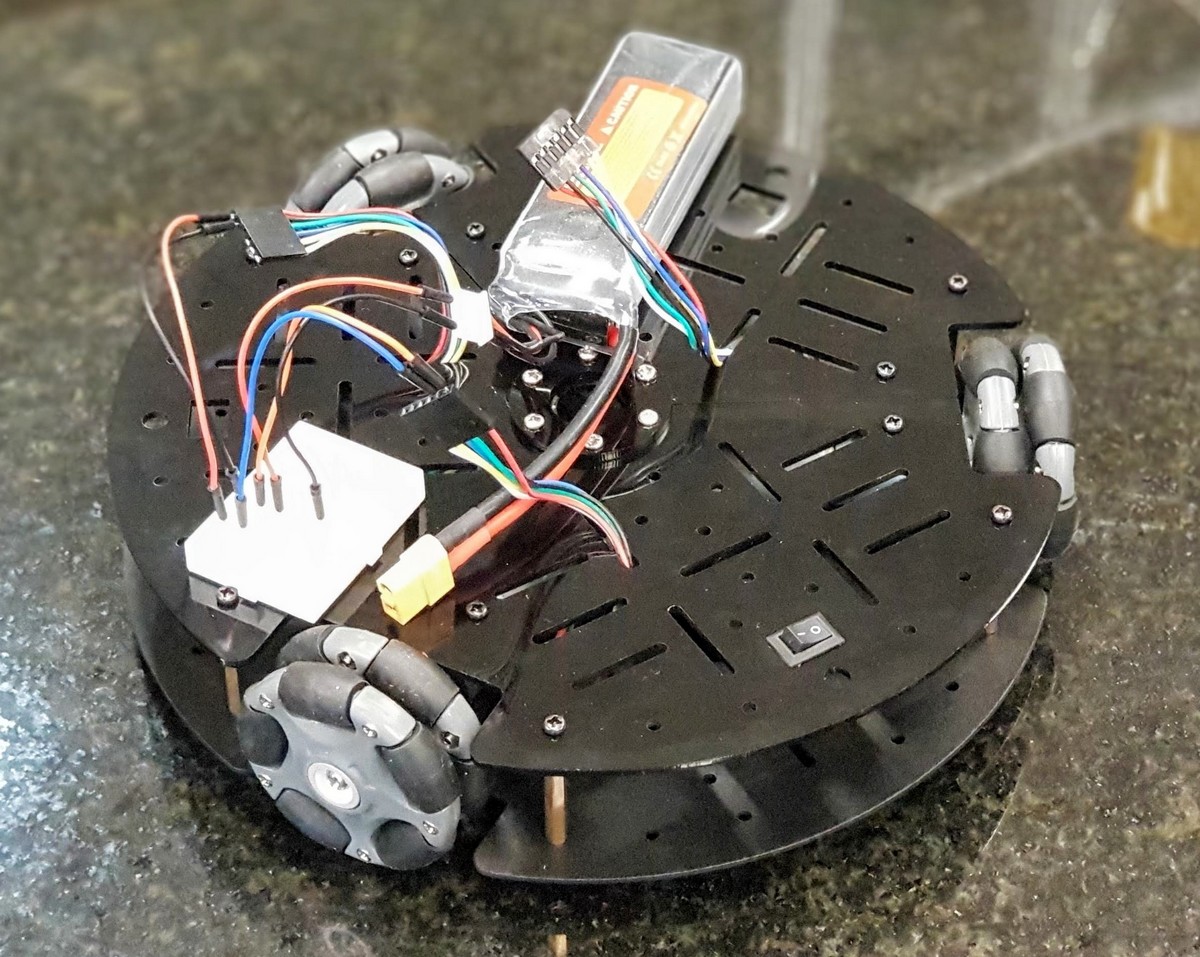
All in all some 550.000₫ are already spend on these simple materials. Further steps include the collaborative project of a self driving robot (Khung xe robot omni đa hướng 2.250.000₫), controlled by an Raspberry Pi 1.580.000 VND with Camera 305.000 VND for object detection and obstacle avoidance.
Future updates
The above program consumes 91% of the available RAM of the Arduino Leonardo. For future projects we need more. Some contenstants:
| Model | RAM instructions | RAM data | Flash | Clock | Pins |
|---|---|---|---|---|---|
| Arduino Leonardo | 2.5 KB | - | 32 KB | 16 MHz | 20 |
| ESP8266 (NodeMCU) | 32 KB | 80 KB | 4000 KB | 160 MHz | 12 |
| ESP32 (WROVER-32) | 520 KB | 4000 KB | 4000 KB | 240 MHz | 20 |
| Raspberry Pi 1 | 512,000 KB | - | 16,000,000 KB | 700 MHz | 26 |
| Raspberry Pi 4 | 4,000,000 KB | - | 64,000,000 KB | 1500 MHz | 40 |
| Nvidia Jetson Nano | 4,000,000 KB | 473 GFLOP | 16,000,000 KB | 918 MHz | 40 |
Remote
how to control with 10 keys
- ‘F’ forward
- ‘B’ backward
- ‘L’ turn left
- ‘R’ turn right
- ‘M’ select (menu)
- ‘S’ start
- ‘T’ triangle
- ‘C’ circle
- ‘X’ button X
- ‘Q’ sQuare
Pin assignment
| pin | general | used for | note |
|---|---|---|---|
| 0 | RX | Bluetooth RX | |
| 1 | TX | Bluetooth TX | 5V level, not 3.3! |
| 2 | Ultrasonic trigger | ||
| 3~ | Ultrasonic echo | ||
| 4 | buzzer | acoustic feedback | |
| 5~ | |||
| 6~ | |||
| 7 | |||
| 8 | |||
| 9~ | Servo ultrasonic | ||
| 10~ | E1 | enable Moter 1 (PWM) | |
| 11~ | E2 | enable Motor 2 (PWM) | |
| 12 | M1 | forward/backward | |
| 13 | LED | M2 | forward/backward |
| A0 | Servo left-right | Robotarm 5-175 | |
| A1 | Servo up-down | Robotarm 45-120 | |
| A2 | Servo forward-back | Robotarm 65-140 | |
| A3 | Servo open-close | Robotarm 90-125 | |
| A4 | |||
| A5 | |||
| SDA | I2C | Display 1602 | optic feedback |
| SCL | I2C | MPU6050 | gyroscope orientation |
Remote control software
- iOS: BitBlue
- Android and PC: Chrome and this browser page: (https://kreier.github.io/remote)
Menu (select, confirmed by number of beeps from buzzer)
- General driving
- Ultrasonic distance with acoustic feedback
- Autonomuous driving (start triangle, stop x)
- Control robot arm
History - gallery
T500
2020-04-04
T400
2020-02-02
T300
2019-11-18
asa
2019-11-04
T200
2019-04-08
T80
2019-03-26
T110
2018-10-25

T100
2018-10-09