VEX History
This repository started in September 2021 to document the virtual skills of team 76209 at SSIS, since all teaching was done online due to the ongoing Covid-19 pandemic. Until the end of 2022 no team was allowed to travel, so even a year later we could not visit Taipei for the Signature Event. But by summer 2023 all restrictions were virtually gone, so this repository turned into a little history of VEX at SSIS and in Vietnam. For season 2024-2025 High Stakes there are 4 teams to represent Vietnam at the V5RC World Championship in Dallas, like the year before. Here is a list:
- 2025 High Stakes 1x MS, 3x HS:
- 2024 Over Under 1x MS: 36070A PENN APPLE JUICE, 3x High School: 36070M 11, 36070J LSTS FATE, 36070F PENN MÌ Ý
- 2023 Spin Up 1x Middle School: 76209M Mission Impossible , 1x High School: 76209R Raccoons
- 2022 Tipping Point (Covid-19)
- 2021 Change-Up (Covid-19)
- 2020 Tower Takeover 1x High school: 76209G
- 2019 Turning Point 1x High School: 76209X
- 2018 In the Zone 1x High School: 76209G
A little more history for the teams starting with 76209 from 2016 to 2023 at SSIS can be found in this PDF document on 85 pages. Starting summer 2023 the new team number is 1599.
VEX at SSIS for 2021-2022 Tipping Point


Highscore
- 09/27/2021 43 points
- 10/08/2021 96 points
- 11/01/2021 102 points
- 11/06/2021 111 points
- 11/08/2021 130 points
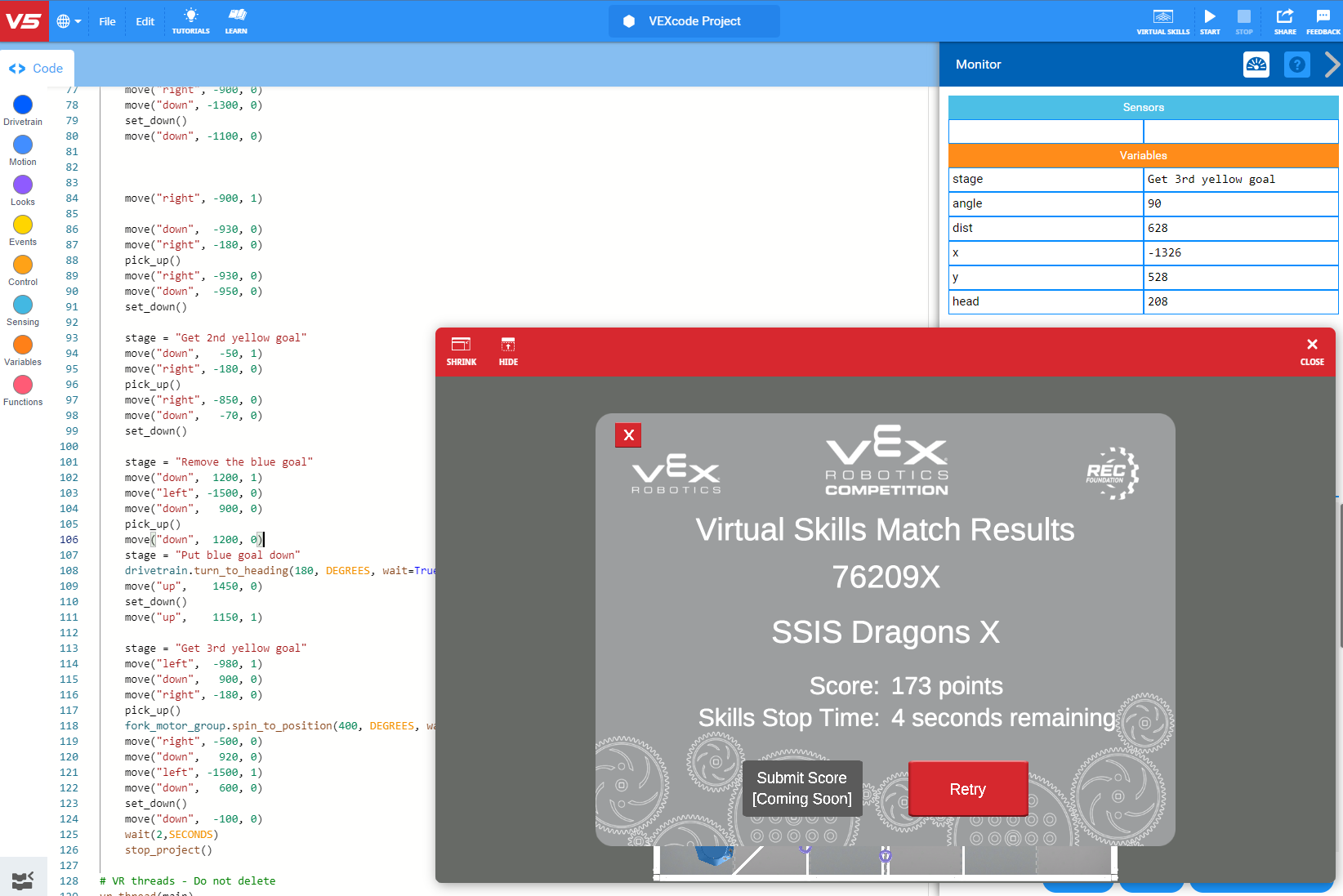
- 11/23/2021 173 points in 57 seconds
- 12/10/2021 130 points in 30 seconds, new
gotofunction
130 points in just 30 seconds - start of December
Created December 10th. With the new goto( x-coordinate, y-coordinate, reverse) function, using GPS and trigonometry.
# 130 points - 60 lines - 30 seconds - 09.12.2021
from vexcode_vrc import *
from math import sqrt
def main():
drivetrain.set_drive_velocity(100,PERCENT)
fork_motor_group.spin_to_position(1800, DEGREES, wait=False)
goto( -920, 920, 0)
goto( -920,-1450, 0)
goto( 750,-1400, 0) # blue in right zone
goto( 500,-1150, 1)
# goto( 0, -950, 0) # m = - 2/5
goto( -600, -710, 0) # yellow in left zone
goto( 400, -250, 1)
goto( 0, 0, 0) # m = - 5/8
goto( -600, 200, 0) # yellow in left zone
goto( 400, 400, 1)
goto( 0, 950, 0)
goto( -600, 950, 0) # yellow in left zone
goto( 920, 950, 1)
goto( 920, 1500, 0)
goto( -600, 1320, 0) # red in left zone
goto( 600, 600, 1)
goto( 600, -600, 1)
goto( 1400,-1350, 1)
goto( 1500, -900, 0) # red on balance
pick_up()
goto( 1500, 100, 0)
stop_project()
def goto(target_x, target_y, reverse):
x1 = gps.x_position(MM)
y1 = gps.y_position(MM)
delta_x = target_x - x1
delta_y = target_y - y1
distance = math.sqrt(delta_x**2 + delta_y**2) # pythagorean theorem
if ( delta_x == 0 ):
if ( delta_y < 0):
direction = 90
else:
direction = 270
else:
direction = - math.atan(delta_y / delta_x) * 180 / math.pi
if ( delta_x < 0 ):
direction = direction + 180
if ( reverse != 0 ):
direction = direction + 180
if ( direction > 360 ):
direction = direction - 360
drivetrain.turn_to_heading(direction, DEGREES, wait=True)
if ( reverse != 0 ):
drivetrain.drive_for(REVERSE, distance, MM, wait=True)
else:
drivetrain.drive_for(FORWARD, distance, MM, wait=True)
def pick_up():
fork_motor_group.spin_to_position(1500, DEGREES, wait=True)
def set_down():
fork_motor_group.spin_to_position(1800, DEGREES, wait=True)
vr_thread(main)
Almost 200 points at the end of November
Here is the code to reach this score:
#----------------------------------------------------------------------
#
# Project: Get Red home
# Description: Both goals in red home zone
#
# Date: 23.11.2021
# Maximum score: 172 points
# Time left: 4 seconds
#
# Starting position: A
# Orientation: Facing East (standard)
# Preload: Zero Rings
#
#----------------------------------------------------------------------
# Library imports
from vexcode_vrc import *
def move(direction, coordinate, reverse):
global angle, x, y, head, dist
angle = 0
x = gps.x_position(MM)
y = gps.y_position(MM)
head = gps.heading() # north is 0, but for the robot 0 is east - from start
monitor_variable("angle","dist","x","y","head")
if ( direction == "right" ):
angle = 0
dist = coordinate - gps.x_position(MM)
if ( direction == "left" ):
angle = 180
dist = gps.x_position(MM) - coordinate
if ( direction == "up" ):
angle = 270
dist = coordinate - gps.y_position(MM)
if ( direction == "down" ):
angle = 90
dist = gps.y_position(MM) - coordinate
drivetrain.turn_to_heading(angle, DEGREES, wait=True)
if (reverse == 0):
drivetrain.drive_for(FORWARD, dist, MM, wait=True)
else:
drivetrain.drive_for(REVERSE, -dist, MM, wait=True)
def pick_up():
fork_motor_group.spin_to_position(1500, DEGREES, wait=True)
def set_down():
fork_motor_group.spin_to_position(1800, DEGREES, wait=True)
# Add project code in "main"
def main():
global stage
stage = "Initiate system"
monitor_variable("stage")
drivetrain.set_drive_velocity(100,PERCENT)
fork_motor_group.spin_to_position(1800, DEGREES, wait=False)
move("right", -920, 0)
stage = "Pick up red goal 1"
move("up", 1500, 0)
move("right", 920, 0)
pick_up()
move("left", -1500, 0)
move("up", 1450, 0)
set_down()
move("up", 1150, 1)
stage = "Pick up red goal 2"
move("right", -950, 0)
move("down", -500, 0)
move("right", 950, 0)
move("down", -1150, 0)
move("right", 1500, 0)
move("up", -900, 0)
pick_up()
move("up", -1200, 0)
move("right", -900, 0)
move("down", -1300, 0)
set_down()
move("down", -1100, 0)
move("right", -900, 1)
move("down", -930, 0)
move("right", -180, 0)
pick_up()
move("right", -930, 0)
move("down", -950, 0)
set_down()
stage = "Get 2nd yellow goal"
move("down", -50, 1)
move("right", -180, 0)
pick_up()
move("right", -850, 0)
move("down", -70, 0)
set_down()
stage = "Remove the blue goal"
move("down", 1200, 1)
move("left", -1500, 0)
move("down", 900, 0)
pick_up()
move("down", 1200, 0)
stage = "Put blue goal down"
drivetrain.turn_to_heading(180, DEGREES, wait=True)
move("up", 1450, 0)
set_down()
move("up", 1150, 1)
stage = "Get 3rd yellow goal"
move("left", -980, 1)
move("down", 900, 0)
move("right", -180, 0)
pick_up()
fork_motor_group.spin_to_position(400, DEGREES, wait=False)
move("right", -500, 0)
move("down", 920, 0)
move("left", -1500, 1)
move("down", 600, 0)
set_down()
move("down", -100, 0)
wait(2,SECONDS)
stop_project()
# VR threads - Do not delete
vr_thread(main)
Code from November 8th, 2021
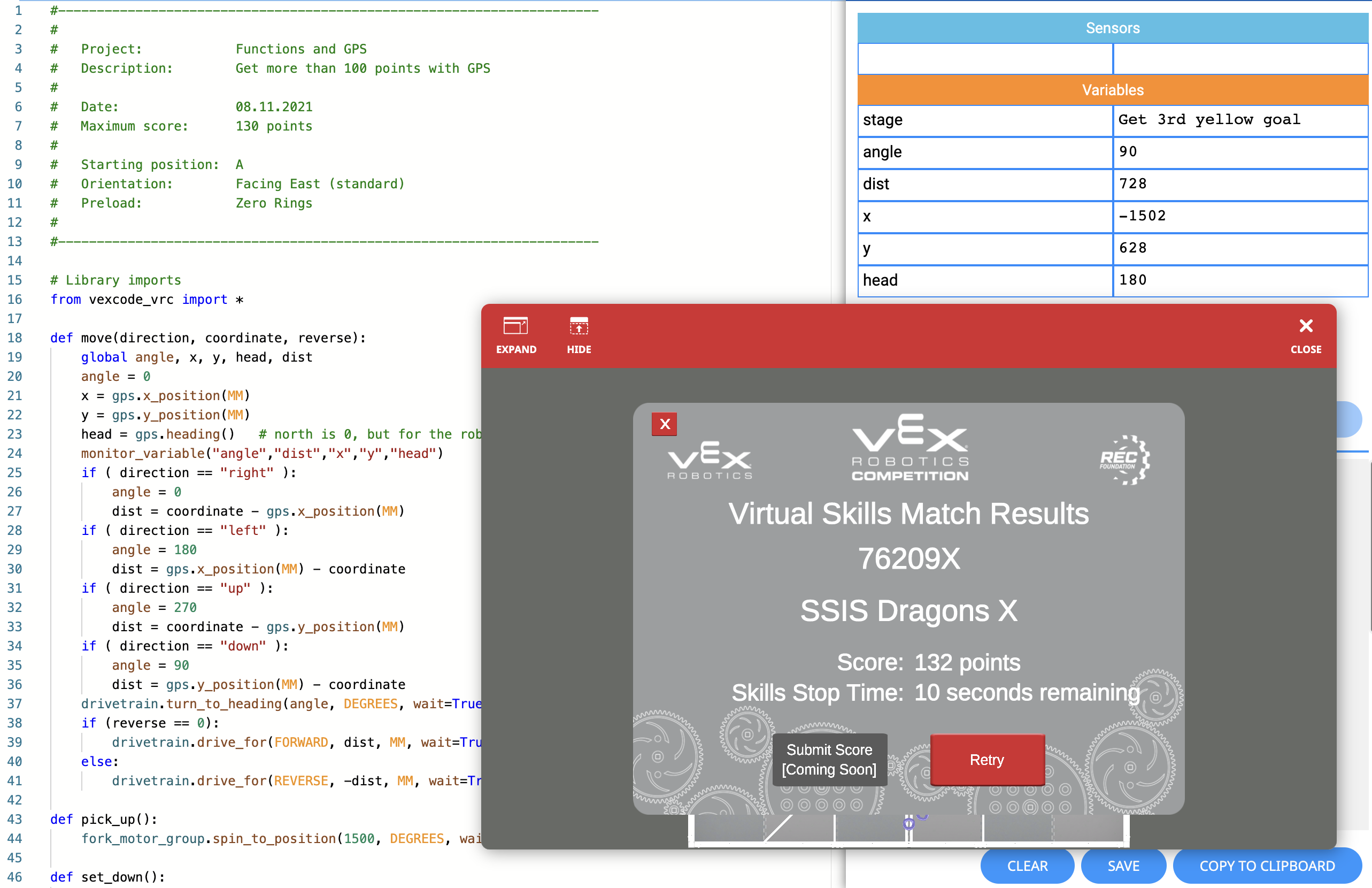
Finally with a function to easier maintain the code and improve readability. The new move(direction, coordinate, reverse) function was created and used for the following 4 weeks.
Possible update: rewrite the move function to move( x-coordinate, y-coordinate, reverse) and adjust the direction with starting position (GPS) and trigonometry. And then add more locations within one minute.
----------------------------------------------------------------------
#
# Project: Calling GPS functions
# Description: Get more than 100 points with GPS
# Driving style: drive, check, correct
# Date: 08.11.2021
# Maximum score: 130 points
# Time left: 10 seconds
#
# Starting position: A
# Orientation: Facing East (standard)
# Preload: Zero Rings
#
#----------------------------------------------------------------------
# Library imports
from vexcode_vrc import *
def move(direction, coordinate, reverse):
global angle, x, y, head, dist
angle = 0
x = gps.x_position(MM)
y = gps.y_position(MM)
head = gps.heading() # north is 0, but for the robot 0 is east - from start
monitor_variable("angle","dist","x","y","head")
if ( direction == "right" ):
angle = 0
dist = coordinate - gps.x_position(MM)
if ( direction == "left" ):
angle = 180
dist = gps.x_position(MM) - coordinate
if ( direction == "up" ):
angle = 270
dist = coordinate - gps.y_position(MM)
if ( direction == "down" ):
angle = 90
dist = gps.y_position(MM) - coordinate
drivetrain.turn_to_heading(angle, DEGREES, wait=True)
if (reverse == 0):
drivetrain.drive_for(FORWARD, dist, MM, wait=True)
else:
drivetrain.drive_for(REVERSE, -dist, MM, wait=True)
def pick_up():
fork_motor_group.spin_to_position(1500, DEGREES, wait=True)
def set_down():
fork_motor_group.spin_to_position(1800, DEGREES, wait=True)
# Add project code in "main"
def main():
global stage
stage = "Initiate system"
monitor_variable("stage")
drivetrain.set_drive_velocity(60,PERCENT)
stage = "Get 1st yellow goal"
fork_motor_group.spin_to_position(1800, DEGREES, wait=False)
move("right", -920, 0)
move("down", -1300, 0)
pick_up()
move("right", 1000, 0)
set_down()
move("right", -900, 1)
move("down", -930, 0)
move("right", -180, 0)
pick_up()
move("right", -930, 0)
move("down", -950, 0)
set_down()
stage = "Get 2nd yellow goal"
move("down", -50, 1)
move("right", -180, 0)
pick_up()
move("right", -850, 0)
move("down", -70, 0)
set_down()
stage = "Remove the blue goal"
move("down", 1200, 1)
move("left", -1500, 0)
move("down", 900, 0)
pick_up()
move("down", 1200, 0)
stage = "Put blue goal down"
drivetrain.turn_to_heading(180, DEGREES, wait=True)
move("up", 1450, 0)
set_down()
move("up", 1150, 1)
stage = "Get 3rd yellow goal"
move("left", -980, 1)
move("down", 900, 0)
move("right", -180, 0)
pick_up()
fork_motor_group.spin_to_position(400, DEGREES, wait=False)
move("right", -500, 0)
move("down", 920, 0)
move("left", -1500, 1)
move("down", 600, 0)
set_down()
move("down", -100, 0)
stop_project()
# VR threads - Do not delete
vr_thread(main)
Finally
More code and older attempts starting September 2021 are in the Github project page.