jetson-car
Autonomous car powered by Nvidia Jetson Nano
This project was planned at AISVN at the end of 2019 to help with machine learning, object detection, inference, computer vision (OpenCV) and artificial intelligence. It uses the 128 CUDA cores of the Nvidia Jetson Nano. The base is a 1:18 model car.

In 2021 I got a 144001 from WLtoys 1:14 car with better chassis, motor and remote control.
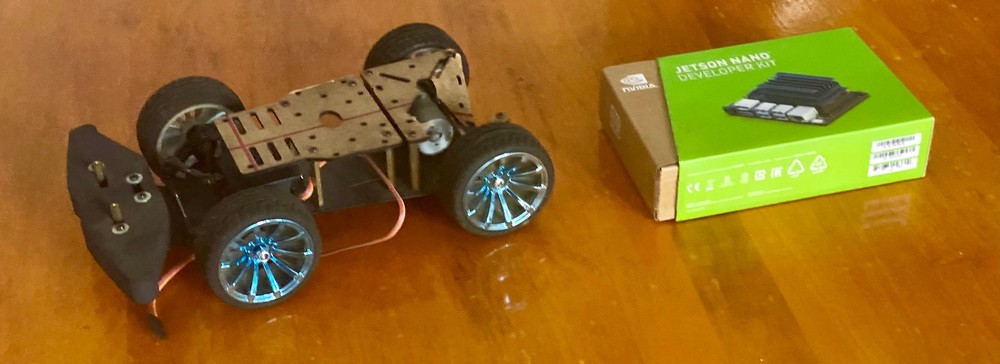
Hardware
Base is this car model unit from hshop.vn for 790.000 VND. They offer a complete kit with lidar (but without the Jetson Nano) for 8 million VND or 300 USD.
Alternative: Similar designs from TAE.VN. Custom aluminum CNC design available after TET 2020:


Machine learning and TensorFlow

For historic reasons (AlexNet 2012 used CUDA) Google decided to base their hardware acceleration for TensorFlow, Keras and cuDNN on CUDA - for many other deep-learning software projects this is an important feature. So we look for a GPU with CUDA cores. It happens to be that I have several, but not all are suitable:
| GPU name | CUDA cores | Compute Capability | at |
|---|---|---|---|
| Jetson Nano | 128 | 5.3 | |
| M1000M | 512 | 5.0 | Zbook 15 G3 |
| GTX960 | 1024 | 5.2 | hp Z600 |
| RTX3070 Ti | 6144 | 8.6 | i3 10100 |
Note that to install the Nvidia CUDA driver for tensorflow you need at least a CC (Compute Capability) of 3.5 or if you compile the source for yourself at least 3.0.
Setup
The planning took place in India at the end of 2019. It includes 7 inch 1024x600 IPS HDMI display, connected to the Jetson Nano and powered by a 10000 mAh battery pack with two 5V 2A outlets. The wireless network had to be added and now the Jetson is equipped with a AC8265 card for WiFi5 and Bluetooth 4.2. The idea with a display originates from several other examples that used a display:


Once the Jetson Nano is up and running the display is probably not nesessary. All connections are wireless and control can be done by ssh or vnc. A video from 2019 by ExplainingComputers shows this be done from a Jupyter Notebook. The Jetbot looks nice, yet someone had to build it and program it. This saves a lot of time, and still it was rather limited. The “edge detection” for the table top shows how limited the algorithms were at that time. Projected cost: $250.
Two years later a more complete set with LIDAR is more than $600. And it states some “runs on ROS” but I doubt that the robot operating system ROS or ROS2 runs on the Jetson Nano. At least the hardware part of the build is simplified.
History
Inspirations and Development
Real-time object detection and classification with edge computing hardware became imaginable in the early 20th century. The changes were really fast. The stages are:
Labeled images - 2007 ImageNet
As Fei Fei Li explains in her TED talk (link below) they started in 2007 to classify around 1,000,000,000 pictures and used Amazon Mechanical Turk with 48,940 workers in 167 countries to create the image database. By 2009 the database had 15,000,000 labeled images in 22,000 categories. And funding back then was a problem!
Classification - 2012 AlexNet
To win the ImageNet 2012 challenge AlexNet used GPUs for its convolutional neural network CNN. It’s running on CUDA. This competition ILSVRC started in 2010 and ran until 2017. The creator of ImageNet Fei Fei Li gave an inspiring TED talk in 2015. Self driving cars are mentioned at minute 1:30. And how much a three-year old can outperform a computer. Elon Musk has been saying since 2014 that autonomous driving is just a year away.
Object detection - 2017 YOLO
The TED Talk from August 2017 by Joseph Redmon from Washington University inspired ideas and possibilities. In his talk he talked about the application for self driving cars. It certainly makes it imaginable, and it was just running on his laptop! A student at HCMUTE used this YOLO (You Only Look Once) software with an NVidia graphics card in his master thesis 2018 for a part in developing an autonomous car. But the GTX 980 with 2048 CUDA cores needs 165 Watt power to work. The power requirement is a challenge for a mobile application.
Mobile affordable platform - 2019 Jetson Nano
Nvidia had the Jetson TK1 platform already created in 2014, but it was power hungry and expensive. But for just 100 Dollars the Jetson Nano was announced in 2019 to be affordable for student projects with just using 5-10 Watt. We applied for a project at hackster.io. But ultimately we ordered a 4GB development platform at the end of 2019 for student projects.
The drive base from TAE was delayed early 2020 because of the starting COVID-19 pandemic and shipments from China. But eventually we got the drive base. Here are the components.
The project stalled from 2020-2024. And a lot happened in the meantime. I got to know the VEX competition and went to the finals in summer 2023 in Dallas. I got to know about VRC and reactivated the robot from Team 426 and mount a chair on it for Reset 2023 exhibition.
Challenges of self driving - 2024
It seemed like the combination of object detection and classification was the main problem making self-driving cars possible, together with latency. As it turns out, there is much more to do. Additional sensors like LIDAR really help, even Tesla finally gave in. And here are some example videos to show what’s possible and what is still challenging:
- Why self-driving cars have stalled - It’s Complicated by The Guardian September 2022
- Lidar vs. Tesla: the race for fully self driving cars from June 2023 by the Verge
- I RACED My Self-Driving RC Car by Steven Gong in July 2023, taking part in the F1 tenth race 2023, but they use Jetson Xavier NX from 2020, at least 3x more powerful than the Nano (Volta instead of Maxwell, 21 TOPS since int8 is supported) and with $399 4x more expensive
- Sorry. Your Car Will Never Drive You Around. - from January 2024, self driving cars are 8 times less safe than humans, see data at minute 15 and 11.3 deaths per 100 million miles for Tesla FSD versus 1.35 deaths for humans
- Video First AI powered Race - A2RL Abu Dhabi - disaster 2024-04-28 https://a2rl.io/
Reactivation of the Jetson Nano Project
In early 2024 I finished assembling the Jetson Nano into the enclosure I purchased in 2020, together with the Wifi card, antenna and camera. It turns out the 5MP Raspberry Pi camera Rev 1.3 with the OV5647 is not compatible with the Jetson Nano! I have two and can’t get them to work. But I have a 720p USB webcam with 120 degrees FOV that should work. While you can adjust the focus with the current driver it has only 80 degrees FOV in 720p and causes a buffer overflow and stalling system when connected to USB. A logitech C270 works without these problems.
Another problem is that updating the software causes incompatibility for the gcc compiler with many errors throwing at you. It’s currently best to stick to Ubuntu 18.04 LTS.
TODO
We need to do many things:
- drive base
- API to communicate
- base to mount the Jetson Nano, power supply and 7 inch screen
- Custom Object detection - video from August 2021 for the Jetson Nano
CUDA
| GPU name | CUDA cores | Compute Capability | at |
|---|---|---|---|
| Quadro NVS 140M | 16 | 1.1 | Thinkpad T61 |
| Quadro FX580 | 32 | 1.1 | hp Z600 |
| GTX 650 | 384 | 3.0 | hp Z600 |
| Jetson Nano | 128 | 5.3 | |
| GT750M | 384 | 3.0 | MBPr15 2014 |
| M1000M | 512 | 5.0 | Zbook 15 G3 |
| GTX960 | 1024 | 5.2 | hp Z600 |
| RTX3070 Ti | 6144 | 8.6 | i3 10100 |