Gearbox

The gearbox has two stages with each reduction ratio of 5.8 to achieve a combined reduction ration of 33.6. For the NEMA 17 servo this reduces the 1000 rpm max to 30 rpm. A 360º turn will take 2 seconds. That’s a good value in a robot.
The torque might increase as well. Labeled at 0.4 Nm if increased by 30x we might reach 12 Nm.
To compare with a BLDC like the INNFOS SCA QDD Lite-NE30-36 it has these values:
- No load 167 rpm vs. 30 rpm
- Load 56 rpm vs. 30 rpm
- Nominal torque 2.3 Nm vs. 12 Nm
- Peak torque 10 Nm vs. 12 Nm
- Power 42 VDC vs. 24 VDC or 3.96 VDC (?)
- Nominal power current 4.8 A vs. 1.68 A (Nema 17)
- Peak current 16.5 A vs. ???
- Weight 232 g vs. 280 g (just the NEMA 17)
I couldn’t find a successful printed strain wave design in the internet - despite many attemps.
History
2020/03/16
Inspired by the INNFOS SCA QDD Lite-NE30-36 I watched some YouTube videos and investigated the possibility of creating an actuator from printed PLA and some stepper motors. Looking at John Lauers and Jeff Kerr (Jan 2019) WE-R2.4 Six-Axis Robot Arm show that the combination of stepper motors and 3D printed gears could work. The project can be found under LoboCNC in Thingiverse (non-commercial).
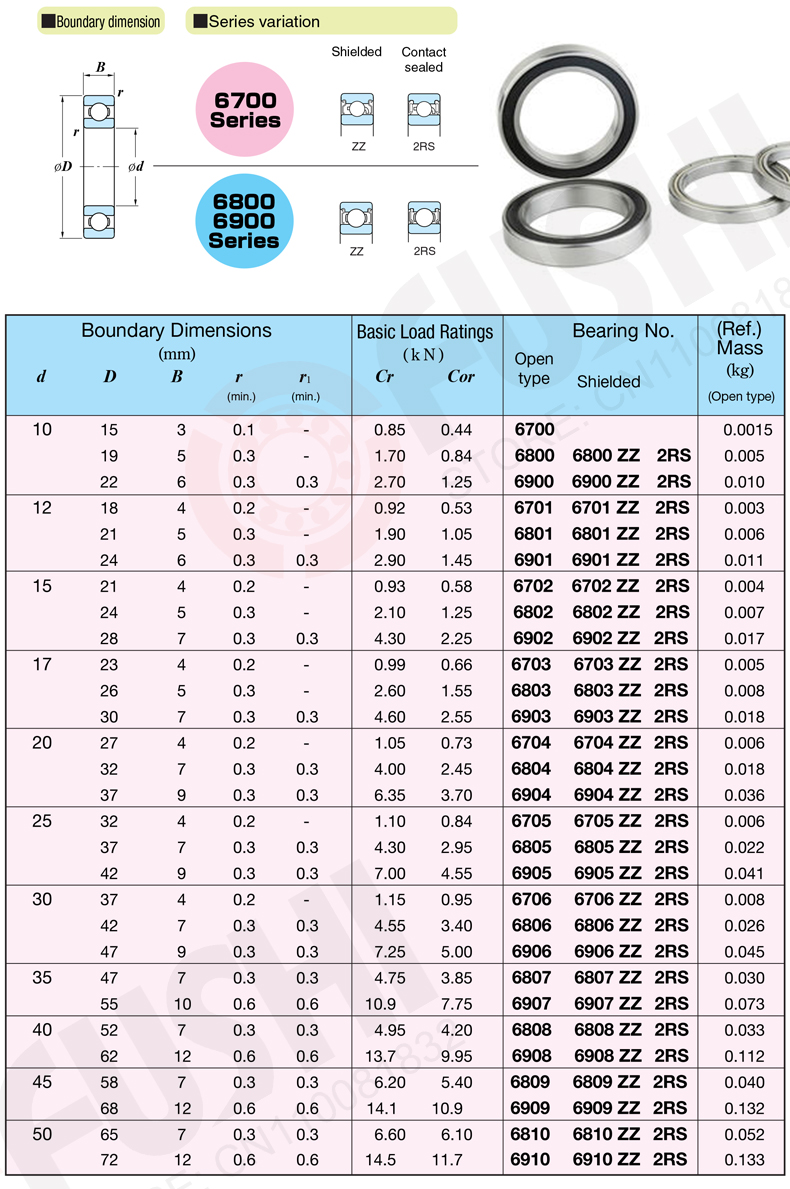
Printed bearings are not very good, as I observed myself with my EEZYbotARM MK2 from Carlo Franciscone (daGHIZmo) April 2017. So I got some 623ZZ bearings (ID 3mm OD 10mm Width 4mm) and a few 6806 ZZ bearings from NTN (30x42x7mm) on the local Yersin market for $2. The 6706 was not available.
Parameters of some common bearings:
2020/03/19
Stefan from CNC Kitchen (another german ;) printed a 1M12T gear with PLA in 2017 and tested them again in a video 2019. Modulus 1 is therefore usable and printable with a 0.4mm nozzle and PLA. I’ll give it a try. Started to design in Fusion 360, using the information given in several tutorials and other videos.
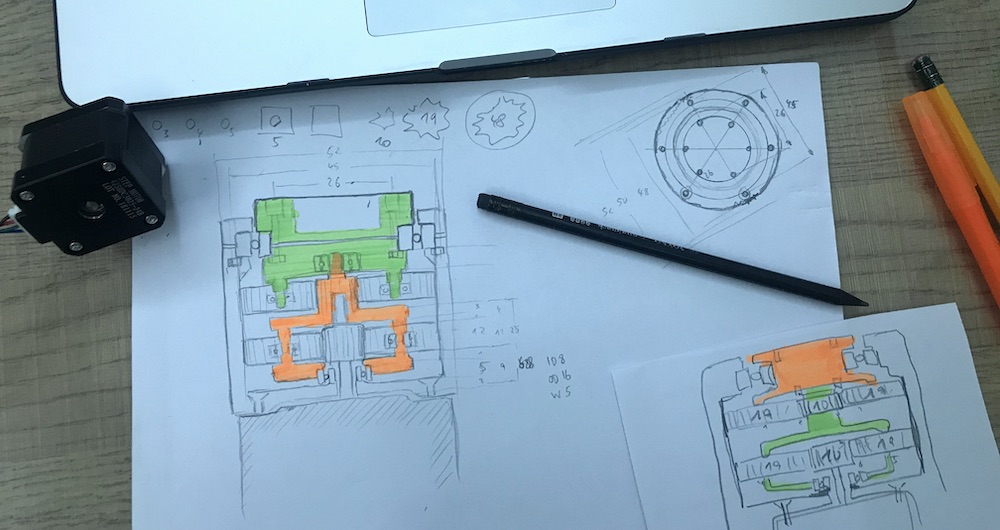
Let’s start with a rough sketch for the design of the 10/19/48 planetary gearbox (epicyclical gear).
2020/03/30
Finally school is open after 2 weeks of quarantine for all teachers. Printed the designed gears: